Альтернативный web gui для openwrt. Настройка OpenWRT. Прошивка и создание сети через роутер. Примечание. На основном роутере Link TL-WDR4300 выход в интернет должен быть уже настроен и DHCP сервер включен
Сервопривод – это привод с управлением через негативную обратную связь, позволяющий точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживает необходимые параметры на датчике и устройстве согласно заданному внешнему значению.
Многие сервоприводы могут быть подключены к Arduino напрямую. Для этого от них идет шлейф из трех проводов:
красный – питание
– подключается к контакту 5V или непосредственно к источнику питания
коричневый или черный
– земля (GND контакт Arduino)
желтый или белый
– сигнал; подключается к цифровому выходу Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространенная задача, что для ее упрощения существует стандартная библиотека Servo (
).
Детальнее о библиотеке
Сама библиотека также
Ограничения по питанию
Обычный хобби-сервопривод при работе потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать несколько сервоприводов, есть смысл задуматься о выделении сервоприводов в контур с дополнительным питанием.
Ограничения по количеству подключенных сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число возрастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite () на 9 і 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite () на 11 и 12 контактах.
Функции библиотеки Servo
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Для этого создается обьект servo класса Servo. Управление осуществляется следующими функциями:
attach ()
– закрепляет привод с конкретным пином. Возможны два варианта синтаксиса для этой функции: servo.attach (pin)
і servo.attach (pin, min, max)
. При этом pin – номер пина, к которому присоединяют сервопривод, min и max – длины импульсов в микросекундах, отвечающие за углы поворота 0 ° и 180 °. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно.
write ()
– отдает команду сервоприводу принять некоторое значение параметра. Синтаксис следующий: servo.write (angle)
, где angle – угол, на который должен обернуться сервопривод.
writeMicroseconds ()
– отдает команду отправить на сервопривод импульс определенной длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий: servo.writeMicroseconds (uS)
, где uS – длина импульса в микросекундах.
read ()
– читает текущее значение угла, в котором находится сервопривод. Синтаксис следующий: servo.read ()
, возвращается целое значение от 0 до 180.
attached ()
– проверка, был присоединен объект к конкретному пину. Синтаксис следующий:servo.attached ()
, логическая единица возвращается, если объект был присоединен к какому-либо пену, или ноль в противном случае.
detach ()
– выполняет действие, обратное действию attach ()
, т.е. отсоединяет объект от пина, к которому он был приписан. Синтаксис следующий: servo.detach ()
.
Для управления изменением положения сервопривода можно использовать потенциометр. Он имеет три контакта подключаемые следующим образом:
Два крайних контакты (как правило) это питание и земля, а средний – информационный. Подсоединяем питания потенциометра –> 5 V Arduino, земля –> GND Arduino, информационный –> аналоговый пин Arduino.
Вот так может выглядеть схема:
А так примитивная программа:
#include
#include Servo myservo ; // create servo object to control a servo int potpin = 0 ; // analog pin used to connect the potentiometer int val ; // variable to read the value from the analog pin |
В этой статье мы поговорим о сервоприводах в проектах Ардуино. Именно благодаря серводвигателям обычные электронные проекты становятся робототехническими. Подключение серво к Arduino проекту позволяет реагировать на сигналы датчиков каким-то точным движением, например, открыть дверцу или повернуть в нужную сторону сенсоры. В статье рассмотрены вопросы управления сервоприводами, возможные схемы подключения серво к ардуино, а также примеры скетчей.
Сервопривод – это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом.
Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
В проектах ардуино робототехники серво часто используется для простейших механических действий:
- Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота.
- Сделать небольшой шаг ногой, движение конечностью или головой.
- Для создания роботов-манипуляторов.
- Для реализации механизма рулевого управления.
- Открыть или закрыть дверку, заслонку или другой предмет.
Конечно, сфера применения серво в реальных проектах гораздо шире, но приведенные примеры являются самыми популярными схемами.
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия – например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом – при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые – контроллеры.
 Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей – с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни. В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.
 Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни – самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
 Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения.
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения.
 Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Когда сигнал попадает в управляющую схему, генератор подает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы происходит сравнение длительности поданного сигнала и сигнала с генератора. Если эти сигналы разные по длительности, включается электромотор, направление вращения которого определяется тем, какой из импульсов короче. При равенстве длины импульсов мотор останавливается.
 Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).

(Использовано изображение с сайта amperka.ru)
Важно учитывать, что на конкретном устройстве настройки могут несколько отличаться от общепринятых значений. У некоторых устройств среднее положение и ширина импульса может быть равной 760 мкс. Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства.
Способ управления приводом часто по ошибке называют PWM/ШИМ, но это не совсем корректно. Управление напрямую зависит именно от длины импульса, частота их появления не так важна. Корректная работа будет обеспечена как при 40 Гц, так и при 60 Гц, вклад внесет только сильное уменьшение или увеличение частоты. При резком спаде сервопривод начнет работать рывками, при завышении частоты выше 100 Гц устройство может перегреться. Поэтому правильнее называть PDM.
По внутреннему интерфейсу можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет – все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой – микропроцессор, принимающий и анализирующий импульсы.

При получении сигнала аналоговый сервопривод принимает решение, менять или нет положение, и по необходимости подает на мотор сигнал с частотой 50 Гц. За время реакции (20 мс) могут произойти внешние воздействия, которые изменят положение сервопривода, и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с большей частотой – от 200 Гц, поэтому он может быстрее отреагировать на внешние воздействия, быстрее развивать нужную скорость и крутящий момент. Следовательно, цифровой сервопривод будет лучше удерживать заданное положение. При этом для работы цифрового сервопривода требуется больше электроэнергии, что повышает их стоимость. Большой вклад в цену делает и сложность их производства. Высокая стоимость – единственный недостаток цифровых сервоприводов, в техническом плане они намного лучше аналоговых устройств.
Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный – к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам – принцип управления серво мы уже описывали ранее.
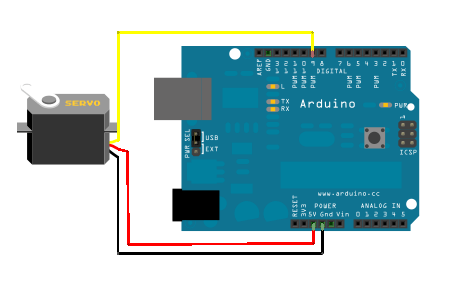
Не рекомендуется подключать мощные серво напрямую к плате, т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью – повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в “дергании” серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Скетч для управления сервоприводом в Arduino
Управление сервоприводом напрямую через изменение в скетче длительности импульсов – достаточно нетривиальная задача, но у нас, к счастью, есть отличная библиотека Servo, встроенная в среду разработки Arduino. Все нюансы программирования и работы с сервоприводами мы рассмотрим в отдельной статье. Здесь же приведем простейший пример использования Servo.
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
#include
Скетч для двух сервпоприводов
А в этом примере мы работаем сразу с двумя сервоприводами:
#include
Управление сервоприводом с помощью потенциометра
В этом примере поворачиваем серво в зависимости от значения, полученное от потенциометра. Считываем значение и преобразовываем его в угол с помощи функции map:
//Фрагмент стандартного примера использования библиотеки Servo void loop() { val = analogRead(A0); // Считываем значение с пина, к которому подключен потенциометр val = map(val, 0, 1023, 0, 180); // Преобразуем число в диапазоне от 0 до 1023 в новый диапазон - от 0 до 180. servo.write(val); delay(15); }

Характеристики и подключение SG-90
Если вы собрались купить самый дешевый и простой сервопривод, то SG 90 будет лушим вариантом Этот серво чаще всего используется в управлении небольшими легкими механизмами с углом поворота от 0° до 180°.
Технические характеристики SG90:
- Скорость отработки команды 0,12с/60 градусов;
- Питание 4,8В;
- Рабочие температуры от -30С до 60 С;
- Размеры 3,2 х 1,2 х 3 см;
- Вес 9 г.
Описание SG90
Цвета проводов стандартные. Сервопривод стоит недорого, он не обеспечивает точных настроек начальных и конечных позиций. Для того, чтобы избежать лишних перегрузок и характерного треска в положении 0 и 180 градусов лучше выставлять крайние точки в 10° и 170°. При работе устройства важно следить за напряжением питания. При сильном завышении этого показателя могут повредиться механические элементы зубчатых механизмов.
Сервоприводы MG995 и MG996 tower pro
Серво MG995 является второй по популярности моделью сервоприводов, чаще всего подключаемых к проектам Arduino. Это относительно недорогие сервомоторы, обладающие гораздо лучшими характеристиками по сравнению с SG90.
Характеристики MG995
Выходной вал у MG995 поворачивается на 120 градусов (по 60 в каждом направлении), хотя многие продавцы указывают на 180 градусов. Устройство выполняется в пластиковом корпусе.
- Вес 55 г;
- Крутящий момент 8,5 кг х см;
- Скорость 0,2с/60 градусов (при 4,8В);
- Рабочее питание 4,8 – 7,2В;
- Рабочие температуры – от 0С до -55С.
Описание MG995
Подключение к ардуино также происходит по трем проводам. В принципе, для любительских проектов допускается подключение MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому рекомендуется все-таки запитывать серво отдельно, не забыв соединить землю обоих контуров питания. Другим упрощающим жизнь вариантом будет использование готовых сервоконтроллеров и шилдов, обзор которых мы подготовим в отдельной статье.
MG996R похож на MG995 по своим характеристикам, только он выполняется в металлическом корпусе.
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения. При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов.
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Заключение
Сервоприводы играют очень важную роль для многих проектов Ардуино, от робототехнических до систем умного дома. Все, что связано с движением, традиционно требует особых знаний и создать полноценный правильно работающий привод – непростая задача. Но с помощью серводвигателей можно во многих случаях упростить задачу, поэтому серво постоянно используется даже в проектах начального уровня.
В этой статье мы постарались раскрыть разные аспекты использования сервоприводов в проектах arduino: от подключения до написания скетчей. Выбрав самую простую модель серво (например, sg 90) вы сможете без труда повторить приведенные примеры и создать свои первые проекты, в которых что-то движется и изменяется. Надеемся, эта статья поможет вам в этом.
Сервоприводы и механизмы оснащены датчиком, который отслеживает определенный параметр, например усилие, положение или скорость, а также управляющий блок в виде электронного устройства. Задачей этого устройства является поддержание необходимых параметров в автоматическом режиме во время функционирования устройства, в зависимости от вида поступающего сигнала от датчика в определенные периоды времени.
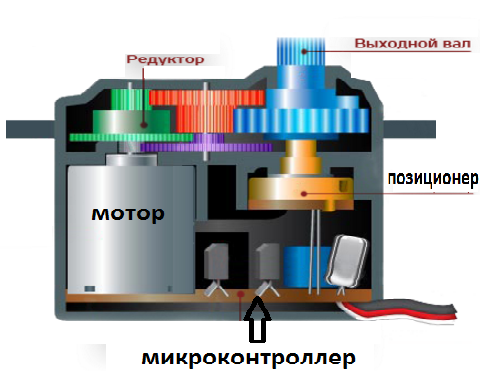
Устройство и работа
От обычного электродвигателя сервопривод отличается тем, что можно задать точное положение вала в градусах. Сервоприводы – это любые механические приводы, которые включают в себя датчик некоторого параметра и блок управления, который способен автоматически поддерживать требуемые параметры, соответствующие определенным внешним значениям.
1 — Шестерни редуктора
2 — Выходной вал
3 — Подшипник
4 — Нижняя втулка
5 — Потенциометр
6 — Плата управления
7 — Винт корпуса
8 — Электродвигатель постоянного тока
9 — Шестерня электродвигателя
Для преобразования электрической энергии в механическое движение, необходим . Приводом является редуктор с электродвигателем. Редуктор требуется для снижения скорости двигателя, так как скорость слишком большая для применения. Редуктор состоит из корпуса, в котором расположены валы с шестернями, способными преобразовывать и передавать крутящий момент.

Путем запуска и останова электродвигателя можно приводить в движение выходной вал редуктора, который связан с шестерней сервопривода. К валу можно присоединять устройство или механизм, которым требуется управлять. Кроме этого для контроля положения вала требуется наличие датчика обратной связи. Этот датчик может преобразовать угол поворота снова в сигнал электрического тока.
Такой датчик получил название энкодера. В качестве энкодера может применяться потенциометр. Если бегунок потенциометра поворачивать, то будет изменяться его сопротивление. Значение этого сопротивления прямо пропорционально зависит от угла поворота потенциометра. Таким образом, есть возможность добиться установки определенного положения механизма.
Кроме выше названного потенциометра, редуктора и электродвигателя, сервоприводы оснащены электронной платой, которая обрабатывает поступающий сигнал внешнего значения параметра от потенциометра, сравнивает, и в соответствии с результатом сравнения запускает или останавливает электродвигатель. Другими словами эта электронная начинка отвечает за поддержку отрицательной обратной связи.
Подключение сервопривода осуществляется тремя проводниками, два из которых подают питание напряжением электродвигателя, а по третьему проводнику поступает сигнал управления, с помощью которого выполняется установка положения вала двигателя.
Кроме электродвигателя, играть роль привода может и другой механизм, например пневматический цилиндр со штоком. В качестве датчика обратной связи применяют также датчики поворота угла, либо . Управляющий блок является сервоусилителем, индивидуальным инвертором. Он может содержать также и датчик сигнала управления.
При необходимости создания плавного торможения или разгона для предотвращения чрезмерных динамических нагрузок двигателя, выполняют схемы более сложных микроконтроллеров управления, которые могут контролировать позицию рабочего элемента намного точнее. Подобным образом выполнено устройство привода установки позиции головок в компьютерных жестких дисках.
Виды сервоприводов
При необходимости создания управления несколькими группами сервоприводов используют контроллеры с ЧПУ, которые собраны на схемах программируемых логических контроллеров. Такие сервоприводы способны обеспечить крутящий момент 50 Н*м, мощностью до 15 киловатт.
Синхронные способны задать скорость вращения электродвигателя с большой точностью, так же как ускорение и угол поворота. Синхронные виды приводов могут быстро достигать номинальной скорости вращения.
Асинхронные способны точно выдерживать скорость даже на очень низких оборотах.
Сервоприводы принципиально разделяют на электромеханические и электрогидромеханические . Электромеханические приводы состоят из редуктора и электродвигателя. Но их быстродействие оказывается намного меньше. В электрогидромеханических приводах движение создается путем движения поршня в цилиндре, вследствие чего быстродействие оказывается на очень высоком уровне.
Характеристики сервоприводов
Рассмотрим основные параметры, которые характеризуют сервоприводы:
- Усилие на валу . Этот параметр является крутящим моментом. Это наиболее важный параметр сервопривода. В паспортных данных чаще всего указывается несколько значений момента для разных величин напряжения.
- Скорость поворота также является важной характеристикой. Она указывается в эквиваленте времени, необходимом для изменения позиции выходного вала привода на 60 градусов. Этот параметр также могут указывать для нескольких значений напряжения.
- Тип сервоприводов бывает аналоговый или цифровой.
- Питание . Основная часть сервоприводов функционирует на напряжении 4,8-7,2 вольта. Питание подается чаще всего по трем проводникам: белый – сигнал управления, красный – напряжение работы, черный – общий провод.
- Угол поворота – это наибольший угол, на который выходной вал способен повернуться. Чаще всего этот параметр равен 180 или 360 градусов.
- Постоянного вращения . При необходимости обычный сервопривод можно модернизировать для постоянного вращения.
- Материал изготовления редуктора сервоприводов бывает различным: карбон, металл, пластик, либо комбинированный состав. Шестерни, выполненные из пластика, не выдерживают ударных нагрузок, однако обладают высокой износостойкостью. Карбоновые шестерни намного прочнее пластмассовых, но имеют высокую стоимость. Шестерни из металла способны выдержать значительные нагрузки, падения, но имеют низкую износостойкость. Выходной вал редуктора устанавливают по-разному на разных моделях: на втулках скольжения, либо на шариковых подшипниках.

Преимущества
- Легкость и простота установки конструкции.
- Безотказность и надежность, что важно для ответственных устройств.
- Не создают шума при эксплуатации.
- Точность и плавность передвижений достигается даже на малых скоростях. В зависимости от поставленной задачи разрешающая способность может настраиваться работником.
Недостатки
- Сложность в настройке.
- Повышенная стоимость.
Применение
Сервоприводы в настоящее время используются достаточно широко. Так, например, они применяются в различных точных приборах, промышленных роботах, автоматах по производству печатных плат, станках с программным управлением, различные клапаны и задвижки.
Наиболее популярными стали быстродействующие приводы в авиамодельном деле. Серводвигатели имеют достоинство в эффективности расхода электрической энергии, а также равномерного движения.
В начале появления серводвигателей использовались коллекторные трехполюсные моторы с обмотками на роторе, и с постоянными магнитами на статоре. Кроме этого, в конструкции двигателя был узел с коллектором и щетками. Далее, по мере технического прогресса число обмоток двигателя увеличилось до пяти, а момент вращения возрос, так же как и скорость разгона.
Следующим этапом развития серводвигателей было расположение обмоток снаружи магнитов. Этим снизили массу ротора, уменьшили время разгона. При этом стоимость двигателя увеличилась. В результате дальнейшего проектирования серводвигателей было решено отказаться от наличия коллектора в устройстве двигателя. Стали применяться двигатели с постоянными магнитами ротора. Мотор стал без щеток, эффективность его возросла вследствие увеличения крутящего момента, скорости и ускорения.
В последнее время наиболее популярными стали сервомоторы, работающие от программируемого контроллера (Ардуино). Вследствие этого открылись большие возможности для проектирования точных станков, роботостроения, авиастроения (квадрокоптеры).
Так как приводы с моторами без коллекторов обладают высокими функциональными характеристиками, точным управлением, повышенной эффективностью, они часто применяются в промышленном оборудовании, бытовой технике (мощные пылесосы с фильтрами), и даже в детских игрушках.
Сервопривод отопления
По сравнению с механической регулировкой системы отопления, электрические сервоприводы являются наиболее совершенными и прогрессивными техническими устройствами, обеспечивающими поддержание параметров отопления помещений.

1 — Блок питания
2 — Комнатные термостаты
3 — Коммутационный блок
4 — Серводвигатели
5 — Подающий коллектор
6 — Обход
7 — Водяной теплый пол
8 — Обратный коллектор
9 — Датчик температуры воды
10 — Циркулярный насос
11 — Шаровый клапан
12 — Регулировочный клапан
13 — Двухходовой термостатический клапан
Привод системы отопления функционирует совместно с термостатом, установленным на стену. Кран с электрическим приводом монтируется на трубе подачи теплоносителя, перед коллектором теплого водяного пола. Далее выполняется подключение питания 220 вольт и настройка терморегулятора рабочего режима.
Система управления оснащается двумя датчиками. Один из них расположен в полу, другой в помещении. Датчики передают сигналы на термостат, управляющий сервоприводом, который соединен с краном. Повысить точность регулировки можно путем установки дополнительного прибора снаружи помещения, так как условия климата непрерывно изменяются, и оказывают влияние на температуру в комнате.
Привод механически соединен с клапаном для его управления. Клапаны могут быть двух- и трехходовыми. Двухходовой клапан может изменять температуру воды в системе. Трехходовой клапан способен поддерживать температуру неизменной, однако изменяет потребление горячей воды, которая подается в контуры. В устройстве трехходового клапана имеется два входа для горячей воды (трубы подачи) и выход обратной воды, через который подается смешанная вода с заданной температурой.

Смешивание воды происходит с помощью клапана. При этом осуществляется регулировка подачи теплоносителя в коллекторы. При открывании одного входа, другой начинает закрываться, а расход воды на выходе не изменяется.
Сервоприводы багажника
В настоящее время современные автомобили чаще всего стали производит с функцией автоматического открывания багажника. Для такой цели применяют рассмотренную нами конструкцию сервопривода. Автопроизводители используют два метода для оснащения такой функцией автомобиля.
Конечно, пневмопривод багажника более надежен, однако его стоимость достаточно высока, поэтому в автомобилях такой привод не нашел применения.
Электрический привод выполняется с разными способами управления:
- Рукояткой на крышке багажника.
- Кнопкой на панели двери водителя.
- С пульта сигнализации.
Открывать багажник вручную не всегда бывает удобным. Например, зимой замок имеет свойство замерзать. Сервопривод дополнительно выполняет функцию защиты автомобиля от чужого проникновения, так как совмещен с устройством замка.
Такие приводы багажника используются на некоторых импортных автомобилях, однако, можно установить такой механизм и на отечественных машинах, было бы желание.
Существуют приводы багажника с магнитными пластинами, однако они не нашли применения, так как их устройство достаточно сложное.

Наиболее приемлемыми по цене являются сервоприводы багажника, которые выполняют только открывание. Функция закрывания для них недоступна. Также можно выбрать конструкцию модели привода, имеющего инерционный механизм. Он играет роль блокировки при появлении препятствия при движении багажника.

Дорогостоящие модели сервоприводов включают в себя механизм подъема и опускания багажника, доводчика механизма запирания, датчиков и контроллера. Обычно их на автомобилях устанавливают на заводе, однако простые конструкции вполне можно монтировать самостоятельно.
Наряду с контроллером и сенсорами, актуаторы являются важным составляющим всех без исключения роботов. Они вращают колеса робота, позволяя ему перемещаться в пространстве, и приводят в действие мощные манипуляторы, которыми он хватает предметы.
В этом уроке мы будем работать с одним из таких актуаторов, который называется сервоприводом (или сервомашинкой). В отличие от обычного электромотора, сервопривод представляет собой сложное составное устройство, состоящее из двигателя постоянного тока, шестеренного редуктора, потенциометра и электронной схемы. Всё это позволяет сервоприводу поворачивать вал строго на заданный угол, и удерживать его. С помощью таких приводов можно, например, сделать вот такой несложный манипулятор:
1. Подключение к Ардуино
Итак, как уже говорилось выше, сервопривод славится тем, что может поворачиваться на заданный угол. Как же мы будем указывать ему этот угол? Предлагаю использовать для этой цели переменный резистор, он же — потенциометр. Будем вращать ручку потенциометра, а контроллер будет командовать сервоприводу поворачиваться на соответствующий угол.
У потенциометра есть всего три вывода. Крайние подключим к +5В и земле, а центральный к аналоговому входу A0.
У сервопривода SG90 также имеется три контакта. Обычно они окрашиваются следующим образом:
- коричневый — земля;
- красный — питание +5В;
- оранжевый (или желтый) — сигнальный.
Сигнальный провод подключим в цифровому выходу №8. В итоге, получим такую схему:

Подключать оба устройства к Ардуино Уно удобнее через макетную плату:

2. Программа
Теперь напишем несложную программу, которая свяжет все элементы нашего аппарата строгой логикой. Все что нам требуется от контроллера — это:
- считывать показания с потенциометра в диапазоне от 0 до 1023;
- преобразовывать полученное число в угол от 0 до 180 градусов;
- передавать полученный угол на сервопривод.
Для написания программы используем наш . Задействуем блок сервопривода, блок чтения из аналогового порта и функцию отображения одного диапазона значений в другой.
Нажав в конструкторе кнопку «Arduino», откроем страницу с исходным кодом программы для среды Arduino IDE:
#include
Как видно из программы, для управления сервоприводом мы использовали библиотеку Servo . В этой библиотеке есть несколько полезных нам функций:
- attach(номер_вывода) — инициализация сервопривода;
- write(угол) — поворот сервопривода на заданный угол;
- read() — получение текущего угла сервопривода.
Для отображения множества чисел 0 — 1023 в множество 0-180, конструктор применил функцию map . Ту же самую операцию, можно было осуществить с помощью выражения:
int angle = (value / 1023.0) * 180;
Загружаем программу на Ардуино Уно, и смотрим что получилось!

Теперь, вы знаете что такое сервопривод, и можете легко им управлять. Вперед! К созданию роботов-манипуляторов и шагающих роботов-пауков!
Возможности Arduino очень разнообразны: от обычного контроля температуры и сбора данных до управления 3D принтерами и умными домами. Также с помощью этой платы можно программировать различные механизмы и даже роботов. Для таких целей очень часто применяются различные движки, моторчики и приводы.
Самыми распространенными и популярными в механизмах являются шаговые двигатели и сервоприводы. О последних мы и поговорим в этой статье. Сервоприводы являются самыми дешевыми и практичными в использовании моторчиками. Их размеры и масса малы, а комбинация из таких модулей поможет успешно создавать роботов.
Начнем знакомство с самым популярным из них, по-другому он еще называется SG90 (Tower Pro Micro Servo 9G). Сервопривод представляет небольшую коробку, в которую запрятан сам механизм. Научившись правильно писать программный код, можно управлять положением вала.
Для подключение сервопривода к Arduino , на плате используется 3 контакта (для подключения используются 3 провода “папа-папа”): питание (5V), заземление и аналоговый выход (расположены на панели digital ). Наглядная схема подключения изображена на рисунке ниже:
Внимание! При подключение более чем одной сервы или одной, но более мощной, можно допустить просадку напряжения на плате Arduino (из-за слабой стабилизации на плате) Поэтому, если подключаете более одного сервопривода, то контакты питания лучше подключать к отдельному источнику, чем к плате.
После того, как подключили, можно зайти в среду разработки Arduino IDE и опробовать первую программу для проверки работоспособности модуля. Также советуем использовать библиотеку Servo.h . Она уже встроена в Arduino IDE, а значит скачивать и устанавливать ее не нужно. И кстати, эта библиотека уже содержит в себе некоторые команды и тем самым упрощает работу с сервоприводом, избавляя нас от очень длинных и занимаемых много места кодов. Она содержит в себе следующие полезные команды:
- attach (номер_вывода) - инициализация сервопривода;
- write (угол) - поворот сервопривода на заданный угол;
- read () - получение текущего угла сервопривода.
Теперь рассмотрим первую программу с использованием сервопривода.
Данная программа позволит изменять угол поворота вала на сервоприводе с течением времени:
#include ; //используем библиотеку для работы с сервоприводом Servo servo; //объявляем переменную servo типа Servo void setup() //процедура setup { servo.attach(10); //привязываем привод к порту 10 } void loop() //процедура loop { servo.write(0); //ставим вал под 0 delay(2000); //ждем 2 секунды servo.write(180); //ставим вал под 180 delay(2000); //ждем 2 секунды }
#include ; //используем библиотеку для работы с сервоприводом Servo servo ; //объявляем переменную servo типа Servo void setup () //процедура setup servo . attach (10 ) ; //привязываем привод к порту 10 void loop () //процедура loop servo . write (0 ) ; //ставим вал под 0 delay (2000 ) ; //ждем 2 секунды servo . write (180 ) ; //ставим вал под 180 |