เงื่อนไขของทัคเกอร์คุงในรูปแบบเรขาคณิต การกำหนดและการพิสูจน์ทฤษฎีบทของคุห์น-ทัคเกอร์ เงื่อนไขที่อ่อนแอกว่า
มีระบบพิกัดหลักสามระบบที่ใช้ในเรขาคณิต กลศาสตร์ทฤษฎี และสาขาฟิสิกส์อื่นๆ: คาร์ทีเซียน ขั้วโลก และทรงกลม ในระบบพิกัดเหล่านี้ จุดทั้งหมดมีพิกัดสามพิกัด เมื่อทราบพิกัดของ 2 จุด คุณจะสามารถกำหนดระยะห่างระหว่างจุดทั้งสองนี้ได้
คุณจะต้องการ
- พิกัดคาร์ทีเซียน เชิงขั้ว และทรงกลมของส่วนปลายของเซ็กเมนต์
คำแนะนำ
1. ขั้นแรก ให้พิจารณาระบบพิกัดคาร์ทีเซียนสี่เหลี่ยม ตำแหน่งของจุดในอวกาศในระบบพิกัดนี้จะถูกกำหนด พิกัด x, y และ z เวกเตอร์รัศมีถูกดึงจากจุดกำเนิดไปยังจุด เส้นโครงของเวกเตอร์รัศมีนี้ลงบนแกนพิกัดจะเป็นดังนี้ พิกัดจุดนี้ให้คุณมีสองจุดด้วย พิกัด x1,y1,z1 และ x2,y2 และ z2 ตามลำดับ เขียนแทนด้วย r1 และ r2 ตามลำดับ ซึ่งเป็นเวกเตอร์รัศมีของจุดที่หนึ่งและจุดที่ 2 เห็นได้ชัดว่าระยะห่างระหว่างจุดทั้งสองนี้จะเท่ากับโมดูลัสของเวกเตอร์ r = r1-r2 โดยที่ (r1-r2) คือความแตกต่างของเวกเตอร์ พิกัดของเวกเตอร์ r จะเป็นดังนี้: x1-x2, y1-y2, z1-z2 จากนั้น ขนาดของเวกเตอร์ r หรือระยะห่างระหว่างจุดสองจุดจะเท่ากับ: r = sqrt(((x1-x2)^2)+((y1-y2)^2)+((z1-z2)^2 )).
2. ตอนนี้ให้พิจารณาระบบพิกัดเชิงขั้วซึ่งพิกัดของจุดจะได้รับจากพิกัดแนวรัศมี r (เวกเตอร์รัศมีในระนาบ XY) พิกัดเชิงมุม? (มุมระหว่างเวกเตอร์ r และแกน X) และพิกัด z คล้ายกับพิกัด z ในระบบคาร์ทีเซียน พิกัดเชิงขั้วของจุดสามารถแปลงเป็นพิกัดคาร์ทีเซียนได้ดังนี้: x = r*cos? , y = r*บาป?, z = z แล้วเว้นระยะห่างระหว่างจุดสองจุดด้วย พิกัด r1, ?1 ,z1 และ r2, ?2, z2 จะเท่ากับ R = sqrt(((r1*cos?1-r2*cos?2)^2)+((r1*sin?1-r2*sin ?2 )^2)+((z1-z2)^2)) = sqrt((r1^2)+(r2^2)-2r1*r2(cos?1*cos?2+sin?1*sin? 2) +((z1-z2)^2))
3. ตอนนี้ดูที่ระบบพิกัดทรงกลม ในนั้นตำแหน่งของจุดจะถูกระบุด้วยสาม พิกัดร ? และ?. r – ระยะทางจากจุดกำเนิดถึงจุด ? และ? – มุมอะซิมุทัลและมุมซีนิท ตามลำดับ มุม? คล้ายกับมุมที่มีชื่อเหมือนกันในระบบพิกัดเชิงขั้วใช่มั้ยล่ะ? – มุมระหว่างเวกเตอร์รัศมี r และแกน Z โดยมี 0<= ? <= pi.Переведем сферические координаты в декартовы: x = r*sin?*cos?, y = r*sin?*sin?*sin?, z = r*cos?. Расстояние между точками с พิกัด r1, ?1, ?1 และ r2, ?2 และ ?2 จะเท่ากับ R = sqrt(((r1*sin?1*cos?1-r2*sin?2*cos?2)^2)+( (r1 *บาป?1*บาป?1-r2*บาป?2*บาป?2)^2)+((r1*cos?1-r2*cos?2)^2)) = (((r1*บาป ?1 )^2)+((r2*บาป?2)^2)-2r1*r2*บาป?1*บาป?2*(cos?1*cos?2+บาป?1*บาป?2)+( (r1 *cos?1-r2*cos?2)^2))
วิดีโอในหัวข้อ
ความยาวตามที่ระบุไว้แล้วจะถูกระบุด้วยเครื่องหมายโมดูลัส
หากให้จุดสองจุดของระนาบ และ ความยาวของส่วนสามารถคำนวณได้โดยใช้สูตร
หากมีการกำหนดสองจุดในอวกาศความยาวของส่วนสามารถคำนวณได้โดยใช้สูตร
บันทึก: สูตรจะยังคงถูกต้องหากมีการสลับพิกัดที่เกี่ยวข้อง: และ แต่ตัวเลือกแรกมีมาตรฐานมากกว่า
ตัวอย่างที่ 3
สารละลาย:ตามสูตรที่เกี่ยวข้อง:
คำตอบ: ![]()
เพื่อความชัดเจนฉันจะวาดรูป 
ส่วนของเส้น - นี่ไม่ใช่เวกเตอร์และแน่นอนว่าคุณไม่สามารถเคลื่อนย้ายมันไปไหนได้ นอกจากนี้ หากคุณวาดเป็นขนาด: 1 หน่วย = 1 ซม. (เซลล์สมุดบันทึกสองเซลล์) ดังนั้นคำตอบที่ได้จึงสามารถตรวจสอบได้โดยใช้ไม้บรรทัดธรรมดาโดยการวัดความยาวของส่วนนั้นโดยตรง
ใช่ วิธีแก้ปัญหานั้นสั้น แต่มีประเด็นสำคัญอีกสองสามประเด็นที่ฉันต้องการชี้แจง:
ประการแรก ในคำตอบ เราใส่มิติ: "หน่วย" สภาพไม่ได้บอกว่ามันคืออะไร มิลลิเมตร เซนติเมตร เมตร หรือกิโลเมตร ดังนั้น วิธีแก้ไขที่ถูกต้องทางคณิตศาสตร์คือสูตรทั่วไป: "หน่วย" - เรียกโดยย่อว่า "หน่วย"
ประการที่สอง ให้เราทำซ้ำเนื้อหาของโรงเรียนซึ่งมีประโยชน์ไม่เพียงแต่สำหรับงานที่พิจารณาเท่านั้น:
ให้ความสนใจกับ เทคนิคที่สำคัญ – ลบตัวคูณออกจากใต้รูท- จากการคำนวณ เราได้ผลลัพธ์ และรูปแบบทางคณิตศาสตร์ที่ดีคือการลบปัจจัยออกจากใต้ราก (ถ้าเป็นไปได้) กระบวนการนี้มีลักษณะเช่นนี้โดยละเอียด: ![]() - แน่นอนว่าการทิ้งคำตอบไว้อย่างที่เป็นอยู่นั้นไม่ใช่ความผิดพลาด แต่แน่นอนว่ามันจะเป็นข้อบกพร่องและเป็นข้อโต้แย้งที่หนักหน่วงสำหรับการพูดเล่นของครู
- แน่นอนว่าการทิ้งคำตอบไว้อย่างที่เป็นอยู่นั้นไม่ใช่ความผิดพลาด แต่แน่นอนว่ามันจะเป็นข้อบกพร่องและเป็นข้อโต้แย้งที่หนักหน่วงสำหรับการพูดเล่นของครู
ต่อไปนี้เป็นกรณีทั่วไปอื่นๆ: 
บ่อยครั้งที่รากสร้างจำนวนที่ค่อนข้างมาก เช่น จะทำอย่างไรในกรณีเช่นนี้? ใช้เครื่องคิดเลขตรวจสอบว่าตัวเลขหารด้วย 4 ลงตัวหรือไม่: ใช่แล้ว มันถูกแบ่งแยกโดยสิ้นเชิง ดังนี้: ![]() - หรือบางทีตัวเลขสามารถหารด้วย 4 อีกครั้งได้? - ดังนั้น:
- หรือบางทีตัวเลขสามารถหารด้วย 4 อีกครั้งได้? - ดังนั้น: ![]() - หลักสุดท้ายของตัวเลขเป็นเลขคี่ ดังนั้นการหารด้วย 4 เป็นครั้งที่สามจะไม่ได้ผลอย่างเห็นได้ชัด ลองหารด้วยเก้า: . ผลที่ตามมา:
- หลักสุดท้ายของตัวเลขเป็นเลขคี่ ดังนั้นการหารด้วย 4 เป็นครั้งที่สามจะไม่ได้ผลอย่างเห็นได้ชัด ลองหารด้วยเก้า: . ผลที่ตามมา:
พร้อม.
บทสรุป:หากเราได้รับตัวเลขที่ไม่สามารถแยกออกมาทั้งหมดได้ภายใต้รูทเราจะพยายามลบตัวประกอบออกจากใต้รูท - ใช้เครื่องคิดเลขเพื่อตรวจสอบว่าตัวเลขหารด้วย: 4, 9, 16, 25, 36 หรือไม่ 49 เป็นต้น
เมื่อแก้ไขปัญหาต่าง ๆ มักพบรากเหง้า พยายามดึงปัจจัยจากใต้รากเสมอเพื่อหลีกเลี่ยงปัญหาเกรดต่ำกว่าและไม่จำเป็นในการสรุปวิธีแก้ปัญหาตามความคิดเห็นของครู
เรามาทำซ้ำการยกกำลังสองและค่ากำลังอื่นๆ กัน: 
กฎการปฏิบัติงานด้วยพลังในรูปแบบทั่วไปมีอยู่ในตำราพีชคณิตของโรงเรียน แต่ฉันคิดว่าจากตัวอย่างที่ให้มา ทุกอย่างหรือเกือบทุกอย่างก็ชัดเจนอยู่แล้ว
งานสำหรับโซลูชันอิสระที่มีส่วนในพื้นที่:
ตัวอย่างที่ 4
คะแนนและได้รับ ค้นหาความยาวของส่วน.
คำตอบและคำตอบอยู่ท้ายบทเรียน
บทความด้านล่างนี้จะครอบคลุมถึงปัญหาในการค้นหาพิกัดที่อยู่กึ่งกลางของเซ็กเมนต์ หากพิกัดของจุดสุดขั้วนั้นมีอยู่ในข้อมูลเริ่มต้น แต่ก่อนที่เราจะเริ่มศึกษาประเด็นนี้ ให้เราแนะนำคำจำกัดความจำนวนหนึ่งก่อน
Yandex.RTB R-A-339285-1 คำจำกัดความ 1
ส่วนของเส้น– เส้นตรงที่เชื่อมต่อจุดสองจุดโดยพลการ เรียกว่าส่วนปลายของส่วน ตามตัวอย่าง ให้เป็นจุด A และ B และส่วน A B ตามลำดับ
หากส่วน A B ต่อเนื่องกันทั้งสองทิศทางจากจุด A และ B เราจะได้เส้นตรง A B จากนั้นส่วน A B ก็เป็นส่วนหนึ่งของเส้นตรงที่เกิดขึ้นซึ่งล้อมรอบด้วยจุด A และ B ส่วน A B รวมจุด A และ B ซึ่งเป็นจุดสิ้นสุด เช่นเดียวกับชุดของจุดที่วางอยู่ระหว่าง ตัวอย่างเช่น หากเราหาจุดใดๆ ที่ต้องการ K ซึ่งอยู่ระหว่างจุด A และ B เราสามารถบอกได้ว่าจุด K อยู่บนส่วน A B
คำจำกัดความ 2
ความยาวส่วน– ระยะห่างระหว่างปลายของเซ็กเมนต์ตามมาตราส่วนที่กำหนด (ส่วนของความยาวหน่วย) ให้เราแสดงความยาวของส่วน AB ดังนี้: A B .
คำจำกัดความ 3
จุดกึ่งกลางของส่วน– จุดที่วางอยู่บนส่วนและอยู่ห่างจากปลายเท่ากัน หากจุดกึ่งกลางของส่วน A B ถูกกำหนดโดยจุด C ความเท่าเทียมกันจะเป็นจริง: A C = C B
ข้อมูลเริ่มต้น: เส้นพิกัด O x และจุดที่ไม่ตรงกัน: A และ B จุดเหล่านี้สอดคล้องกับจำนวนจริง x ก และ เอ็กซ์ บี . จุด C อยู่ตรงกลางของกลุ่ม AB: จำเป็นต้องกำหนดพิกัด x ซี
เนื่องจากจุด C เป็นจุดกึ่งกลางของส่วน AB ความเท่าเทียมกันจึงเป็นจริง: | เอ ซี | - ซีบี | - ระยะห่างระหว่างจุดต่างๆ ถูกกำหนดโดยโมดูลัสของความแตกต่างในพิกัด เช่น
- เอ ซี | - ซีบี | ⇔ x C - x A = x B - x C
จากนั้นมีความเท่าเทียมกันสองประการ: x C - x A = x B - x C และ x C - x A = - (x B - x C)
จากความเท่าเทียมกันครั้งแรกเราได้สูตรสำหรับพิกัดของจุด C: x C = x A + x B 2 (ครึ่งหนึ่งของผลรวมพิกัดของส่วนท้ายของส่วน)
จากความเท่าเทียมกันประการที่สอง เราได้: x A = x B ซึ่งเป็นไปไม่ได้ เนื่องจาก ในแหล่งข้อมูล - จุดที่ไม่ตรงกัน ดังนั้น, สูตรกำหนดพิกัดของจุดกึ่งกลางของส่วน AB ที่ปลาย A (x A) และข(xB):
สูตรที่ได้จะเป็นพื้นฐานในการกำหนดพิกัดของจุดกึ่งกลางของส่วนบนระนาบหรือในอวกาศ
ข้อมูลเริ่มต้น: ระบบพิกัดสี่เหลี่ยมบนระนาบ O x y จุดที่ไม่ตรงกันสองจุดโดยกำหนดพิกัด A x A, y A และ B x B, y B จุด C อยู่ตรงกลางของกลุ่ม A B จำเป็นต้องกำหนดพิกัด x C และ y C สำหรับจุด C
ให้เราวิเคราะห์กรณีที่จุด A และ B ไม่ตรงกันและไม่อยู่บนเส้นพิกัดเดียวกันหรือเส้นตั้งฉากกับแกนใดแกนหนึ่ง ก x , ก ย ; B x, B y และ C x, C y - การฉายภาพของจุด A, B และ C บนแกนพิกัด (เส้นตรง O x และ O y)

ตามการก่อสร้าง เส้น A A x, B B x, C C x ขนานกัน เส้นขนานกันด้วย เมื่อรวมกับสิ่งนี้ ตามทฤษฎีบทของทาเลส จากความเท่าเทียมกัน A C = C B ความเท่าเทียมกันจะเป็นดังนี้: A x C x = C x B x และ A y C y = C y B y และในทางกลับกันบ่งชี้ว่าจุด C x คือ ตรงกลางของส่วน A x B x และ C y อยู่ตรงกลางของส่วน A y B y จากนั้นตามสูตรที่ได้รับก่อนหน้านี้เราจะได้:
x C = x A + x B 2 และ y C = y A + y B 2
สามารถใช้สูตรเดียวกันได้ในกรณีที่จุด A และ B อยู่บนเส้นพิกัดเดียวกันหรือเส้นตั้งฉากกับแกนใดแกนหนึ่ง เราจะไม่ทำการวิเคราะห์โดยละเอียดเกี่ยวกับกรณีนี้ เราจะพิจารณาเฉพาะในรูปแบบกราฟิกเท่านั้น:


โดยสรุปทั้งหมดที่กล่าวมาข้างต้น พิกัดตรงกลางของส่วน AB บนระนาบกับพิกัดของส่วนปลายก (x ก , ย ก) และบี(xB, ยB) ถูกกำหนดให้เป็น:
(x A + x B 2 , ใช่ A + Y B 2)
ข้อมูลเริ่มต้น: ระบบพิกัด O x y z และจุดสองจุดโดยกำหนดพิกัด A (x A, y A, z A) และ B (x B, y B, z B) จำเป็นต้องกำหนดพิกัดของจุด C ซึ่งอยู่ตรงกลางของส่วน A B
ก x , ก , ก z ; B x , B y , B z และ C x , C y , C z - การฉายภาพของจุดที่กำหนดทั้งหมดบนแกนของระบบพิกัด
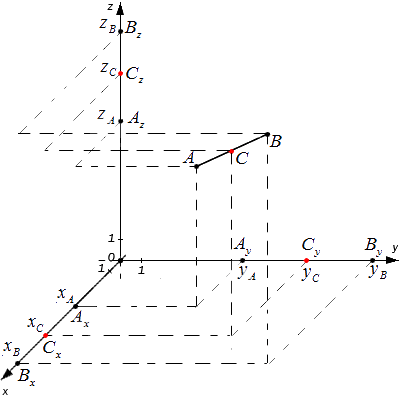
ตามทฤษฎีบทของทาเลส ความเท่าเทียมกันต่อไปนี้เป็นจริง: A x C x = C x B x , A y C y = C y B y , A z C z = C z B z
ดังนั้น จุด C x , C y , C z คือจุดกึ่งกลางของกลุ่ม A x B x , A y B y , A z B z ตามลำดับ แล้ว, ในการกำหนดพิกัดของจุดกึ่งกลางของส่วนในอวกาศ สูตรต่อไปนี้ถูกต้อง:
x C = x A + x B 2, y c = y A + y B 2, z c = z A + Z B 2
สูตรผลลัพธ์ยังสามารถใช้ได้ในกรณีที่จุด A และ B อยู่บนเส้นพิกัดเส้นใดเส้นหนึ่ง บนเส้นตรงตั้งฉากกับแกนใดแกนหนึ่ง ในระนาบพิกัดหนึ่งหรือระนาบที่ตั้งฉากกับระนาบพิกัดอันใดอันหนึ่ง
การกำหนดพิกัดของจุดกึ่งกลางของเซ็กเมนต์ผ่านพิกัดของเวกเตอร์รัศมีของส่วนปลาย
สูตรในการค้นหาพิกัดของจุดกึ่งกลางของเซกเมนต์สามารถหาได้จากการตีความเวกเตอร์เชิงพีชคณิต
ข้อมูลเริ่มต้น: ระบบพิกัดคาร์ทีเซียนสี่เหลี่ยม O x y จุดที่มีพิกัดที่กำหนด A (x A, y A) และ B (x B, x B) จุด C อยู่ตรงกลางของกลุ่ม A B
ตามคำจำกัดความทางเรขาคณิตของการกระทำบนเวกเตอร์ ความเท่าเทียมกันต่อไปนี้จะเป็นจริง: O C → = 1 2 · O A → + O B → . จุด C ในกรณีนี้คือจุดตัดของเส้นทแยงมุมของสี่เหลี่ยมด้านขนานที่สร้างขึ้นบนพื้นฐานของเวกเตอร์ O A → และ O B → เช่น จุดกึ่งกลางของเส้นทแยงมุม พิกัดของเวกเตอร์รัศมีของจุดเท่ากับพิกัดของจุด จากนั้นความเท่ากันจะเป็นจริง: O A → = (x A, y A), O B → = (x B , และ ข) มาดำเนินการบางอย่างกับเวกเตอร์ในพิกัดและรับ:
O C → = 1 2 · O A → + O B → = x A + x B 2 , y A + y B 2
ดังนั้นจุด C จึงมีพิกัด:
x A + x B 2 , ใช่ A + y B 2
โดยการเปรียบเทียบ สูตรถูกกำหนดเพื่อค้นหาพิกัดของจุดกึ่งกลางของส่วนในอวกาศ:
C (x A + x B 2, และ A + y B 2, z A + z B 2)
ตัวอย่างการแก้ปัญหาการหาพิกัดของจุดกึ่งกลางของเซ็กเมนต์
ในบรรดาปัญหาที่เกี่ยวข้องกับการใช้สูตรที่ได้รับข้างต้น มีคำถามโดยตรงคือการคำนวณพิกัดของส่วนตรงกลางและปัญหาที่เกี่ยวข้องกับการนำเงื่อนไขที่กำหนดมาสู่คำถามนี้: คำว่า "ค่ามัธยฐาน" มักใช้โดยมีเป้าหมายคือค้นหาพิกัดของจุดหนึ่งจากปลายเซกเมนต์และปัญหาสมมาตรก็เป็นเรื่องปกติเช่นกัน ซึ่งวิธีแก้ปัญหาโดยทั่วไปไม่ควรทำให้เกิดปัญหาหลังจากศึกษาหัวข้อนี้ ลองดูตัวอย่างทั่วไป
ตัวอย่างที่ 1
ข้อมูลเริ่มต้น:บนเครื่องบิน - จุดที่มีพิกัดที่กำหนด A (- 7, 3) และ B (2, 4) จำเป็นต้องค้นหาพิกัดของจุดกึ่งกลางของกลุ่ม A B
สารละลาย
เรามาแสดงจุดกึ่งกลางของกลุ่ม A B กันที่จุด C พิกัดจะถูกกำหนดเป็นครึ่งหนึ่งของผลรวมของพิกัดส่วนท้ายของเซ็กเมนต์นั่นคือ จุด A และ B
x C = x A + x B 2 = - 7 + 2 2 = - 5 2 ปี C = y A + y B 2 = 3 + 4 2 = 7 2
คำตอบ: พิกัดตรงกลางของกลุ่ม AB - 5 2, 7 2.
ตัวอย่างที่ 2
ข้อมูลเริ่มต้น:รู้จักพิกัดของสามเหลี่ยม A B C: A (- 1, 0), B (3, 2), C (9, - 8) จำเป็นต้องหาความยาวของค่ามัธยฐาน A M
สารละลาย
- ตามเงื่อนไขของปัญหา A M คือค่ามัธยฐาน ซึ่งหมายความว่า M คือจุดกึ่งกลางของส่วน B C ก่อนอื่น เรามาค้นหาพิกัดที่อยู่ตรงกลางของส่วน B C กันก่อน เช่น คะแนนเอ็ม:
x M = x B + x C 2 = 3 + 9 2 = 6 ปี M = y B + y C 2 = 2 + (- 8) 2 = - 3
- เนื่องจากตอนนี้เรารู้พิกัดของปลายทั้งสองของค่ามัธยฐาน (จุด A และ M) เราจึงสามารถใช้สูตรเพื่อกำหนดระยะห่างระหว่างจุดและคำนวณความยาวของค่ามัธยฐาน A M:
ก. = (6 - (- 1)) 2 + (- 3 - 0) 2 = 58
คำตอบ: 58
ตัวอย่างที่ 3
ข้อมูลเริ่มต้น:ในระบบพิกัดสี่เหลี่ยมของปริภูมิสามมิติ จะได้ A B C D A 1 B 1 C 1 D 1 ที่ขนานกัน พิกัดของจุด C 1 ถูกกำหนดไว้ (1, 1, 0) และจุด M ก็ถูกกำหนดด้วยซึ่งเป็นจุดกึ่งกลางของเส้นทแยงมุม B D 1 และมีพิกัด M (4, 2, - 4) จำเป็นต้องคำนวณพิกัดของจุด A
สารละลาย
เส้นทแยงมุมของเส้นทแยงมุมที่ตัดกัน ณ จุดหนึ่งซึ่งเป็นจุดกึ่งกลางของเส้นทแยงมุมทั้งหมด จากข้อความนี้ เราสามารถจำไว้ว่าจุด M ซึ่งทราบจากเงื่อนไขของปัญหาคือจุดกึ่งกลางของส่วน A C 1 จากสูตรในการค้นหาพิกัดของจุดกึ่งกลางของส่วนในอวกาศ เราจะหาพิกัดของจุด A: x M = x A + x C 1 2 ⇒ x A = 2 x M - x C 1 = 2 4 - 1 + 7 y M = y A + y C 1 2 ⇒ y A = 2 y M - y C 1 = 2 2 - 1 = 3 z M = z A + z C 1 2 ⇒ z A = 2 z M - z ค 1 = 2 · (- 4) - 0 = - 8
คำตอบ:พิกัดของจุด A (7, 3, - 8)
หากคุณสังเกตเห็นข้อผิดพลาดในข้อความ โปรดไฮไลต์แล้วกด Ctrl+Enter
การกำหนดปัญหา
ลองพิจารณาปัญหาการปรับให้เหมาะสมแบบไม่เชิงเส้น ให้มีฟังก์ชัน
ภายใต้เงื่อนไข
William Karush ในวิทยานิพนธ์ของเขาพบเงื่อนไขที่จำเป็นในกรณีทั่วไป เมื่อเงื่อนไขที่กำหนดอาจมีทั้งสมการและอสมการ Harold Kuhn และ Albert Tucker ได้ข้อสรุปเดียวกันโดยอิสระ
เงื่อนไขที่จำเป็นสำหรับฟังก์ชันขั้นต่ำ
ภายใต้ข้อจำกัดที่กำหนด หากมีวิธีแก้ไขปัญหา ก็จะมีเวกเตอร์ที่ไม่ใช่ศูนย์ของตัวคูณลากรองจ์ เช่นนั้นสำหรับฟังก์ชันลากรองจ์ ![]() ตรงตามเงื่อนไข:
ตรงตามเงื่อนไข:
เงื่อนไขที่เพียงพอสำหรับฟังก์ชันขั้นต่ำ
เงื่อนไขที่จำเป็นที่ระบุไว้สำหรับฟังก์ชันขั้นต่ำนั้นไม่เพียงพอในกรณีทั่วไป มีหลายตัวเลือกสำหรับเงื่อนไขเพิ่มเติมที่ทำให้เพียงพอ
ถ้อยคำง่ายๆ
ถ้าสำหรับจุดที่ยอมรับได้ เงื่อนไขของความคงที่ การไม่แข็งเกร็งและการไม่ปฏิเสธเสริม รวมถึง แลมบ์ดา 1 > 0 ก็เป็นที่พอใจแล้ว
เงื่อนไขที่อ่อนแอกว่า
หากสำหรับจุดที่ยอมรับได้ เงื่อนไขของความคงที่ เสริมกับความไม่เข้มงวดและการไม่เป็นเชิงลบ เช่นเดียวกับ ( สภาพของสเลเตอร์), ที่ .
มูลนิธิวิกิมีเดีย 2010.
ดูว่า "เงื่อนไขของ Karush-Kuhn-Tucker" ในพจนานุกรมอื่น ๆ คืออะไร:
ในทฤษฎีการหาค่าเหมาะที่สุด เงื่อนไขของ Karush Kuhn Tucker (KKT) เป็นเงื่อนไขที่จำเป็นสำหรับการแก้ปัญหาการเขียนโปรแกรมแบบไม่เชิงเส้น เพื่อให้วิธีแก้ปัญหามีความเหมาะสมที่สุด ต้องทำบางสิ่ง... ... Wikipedia
ในทฤษฎีการหาค่าเหมาะที่สุด เงื่อนไขของ Karush Kuhn Tucker (KKT) เป็นเงื่อนไขที่จำเป็นสำหรับการแก้ปัญหาการเขียนโปรแกรมแบบไม่เชิงเส้น เพื่อให้วิธีแก้ปัญหามีความเหมาะสมที่สุด จะต้องเป็นไปตามเงื่อนไขความสม่ำเสมอบางประการ.... ... Wikipedia
William Karush William Karush วันเกิด: 1 มีนาคม 1917 (1917 03 01) สถานที่เกิด: ชิคาโก สหรัฐอเมริกา วันแห่งความตาย ... Wikipedia
คำนี้มีความหมายอื่น โปรดดู การเพิ่มประสิทธิภาพ การเพิ่มประสิทธิภาพในวิชาคณิตศาสตร์ วิทยาการคอมพิวเตอร์ และการวิจัยการดำเนินงาน ปัญหาการหาจุดสุดยอด (ขั้นต่ำหรือสูงสุด) ฟังก์ชั่นวัตถุประสงค์ในบางโดเมนของเวกเตอร์มิติจำกัด ... Wikipedia Wikipedia
วิธีตัวคูณลากรองจ์ คือวิธีการหาค่าปลายสุดแบบมีเงื่อนไขของฟังก์ชัน f(x) โดยที่เมื่อสัมพันธ์กับข้อจำกัด m ตัวแปร i จะแปรผันจาก 1 ถึง m สารบัญ 1 คำอธิบายวิธีการ ... Wikipedia
ทฤษฎีบทของคุห์น-ทัคเกอร์เป็นชื่อทั่วไปของข้อความที่แสดงถึงลักษณะทั่วไป
การประยุกต์ทฤษฎีบทลากรองจ์กับปัญหาการหาค่าเหมาะที่สุดที่มีข้อจำกัดในรูปของความไม่เท่าเทียมกัน เช่น ปัญหา
ประเภทต่อไปนี้:
กจ(x) > 0, เจ = 1, .
เอ็ม(?)
x = (x1, . . . , xn) 2 X
นี่ฉ: X 7! R - (ตามคำศัพท์ที่กำหนด) ฟังก์ชั่นวัตถุประสงค์ gr: X 7! อาร์
ร = 1, . - - ,m เป็นฟังก์ชันจำกัด X _ Rn เป็นเซตเปิด
ทฤษฎีบท 196 (ทฤษฎีบทของจอห์นในแง่ของจุดอาน):
ให้ฟังก์ชัน f( ), g1( ), . - - , gn( ) มีความเว้า และ?x เป็นวิธีการแก้ปัญหา (?) เช่นนั้น?x 2 intX
จากนั้นก็มีตัวคูณลากรองจ์ _j >
X เป็นวิธีการแก้ปัญหา
เรานำเสนอข้อความเหล่านี้ในกรณีที่ฟังก์ชัน f, gr สามารถหาอนุพันธ์ได้ (ทฤษฎีบทของ Ku-
on-Tucker ในรูปแบบดิฟเฟอเรนเชียล)
จำได้ว่าเป็นฟังก์ชัน
L(x,_) = _0f(x) +
เรียกว่าฟังก์ชันลากรองจ์ (Lagrangian) ของปัญหานี้ และค่าสัมประสิทธิ์ _j เป็นตัวคูณ
ลากรองจ์
ข้อความต่อไปนี้ถือเป็น
ทฤษฎีบท 197 (ทฤษฎีบทของจอห์นสำหรับฟังก์ชันเชิงอนุพันธ์):
ปล่อยให้?x เป็นวิธีแก้ปัญหา (?) เช่น that?x 2 intX และฟังก์ชัน f( ), g1( ), . - - , gn( ) ส่วนต่าง
สามารถวัดปริมาณได้ที่จุด?x
จากนั้นจะมีตัวคูณลากรองจ์ _j > 0, j = 0, - - ,ม. ไม่ใช่ทั้งหมด เท่ากับศูนย์, ดังนั้น
เป็นไปตามความสัมพันธ์ต่อไปนี้ (เงื่อนไขของ Kuhn-Tucker):
0, ผม = 1, . - - , n
J = 0 (เงื่อนไขของการเสริม
ไม่แข็งกระด้าง)
โปรดทราบว่าเงื่อนไขสำหรับความหย่อนเสริมสามารถเขียนได้ในรูปแบบ
กจ(?x)_j = 0, เจ = 1, . - - , ม.
จากเงื่อนไขเหล่านี้ จะตามมาว่าหากตัวคูณลากรองจ์เป็นค่าบวก (_j > 0) แล้วค่าที่สอดคล้องกัน
ข้อจำกัดในการแก้ปัญหา (ที่ x = ?x) ถือเป็นความเท่าเทียมกัน (เช่น gj(?x) = 0) คนอื่น
กล่าวอีกนัยหนึ่ง ข้อจำกัดนี้มีผลอยู่ ในทางกลับกัน ในกรณีที่ gj(?x) > 0 ดังนั้นค่าที่สอดคล้องกัน
ตัวคูณลากรองจ์ _j เท่ากับศูนย์
หากในปัญหา (?) ข้อจำกัดบางอย่างมีรูปแบบของข้อจำกัดเกี่ยวกับการไม่ปฏิเสธของ xi บางตัว
คุณไม่สามารถแนะนำตัวคูณลากรองจ์ได้โดยเขียนข้อ จำกัด ต่อไปนี้แยกกันสำหรับพวกเขา:
กจ(x) > 0, เจ = 1, . - - , ม. (??)
xi > 0, i 2 P _ (1, . . . , n) ที่จุดภายใน (ในแง่ที่ว่า 1 ?x 2 intX) เงื่อนไขลำดับแรกของ i 2 P คือ
จะมีลักษณะเช่นนี้:
สำหรับ i /2 P ที่นี่ เช่นในกรณีของการแทนปัญหาในรูปแบบ (?) อนุพันธ์ของฟังก์ชันลากรองจ์
สำหรับตัวแปรนั้นจะมีลักษณะเป็น @L(?x,_)
นอกจากนี้ยังเป็นไปตามเงื่อนไขของความไม่เข้มงวดเสริมอีกด้วย
จากเงื่อนไขที่สอง เป็นไปตามนั้น for?xi > 0 (i 2 P)
ในทางกลับกัน ถ้า @L(?x,_)/@xi การปรับเปลี่ยนทฤษฎีบทอีกอย่างหนึ่งเกี่ยวข้องกับการมีอยู่ของข้อจำกัดในรูปแบบของความเท่าเทียมกันในปัญหา การกำหนด
ให้เรากำหนดชุดของดัชนีที่สอดคล้องกันผ่าน E ปัญหาจะอยู่ในรูปแบบต่อไปนี้:
gj(x) > 0, เจ 2 (1, . . . ,m)\E,
กจ(x) = 0, เจ 2 อี, (???)
xi > 0, i 2 P _ (1, . . . , n)
ในเวลาเดียวกัน ทฤษฎีบทของจอห์นได้ขจัดเงื่อนไขที่ว่าตัวคูณลากรองจ์ทั้งหมดไม่เป็นลบ -
ตัวคูณลากรองจ์ _j สำหรับ j 2 E สามารถมีเครื่องหมายใดก็ได้
ทฤษฎีบทของจอห์นไม่ได้รับประกันว่าตัวคูณลากรองจ์ของฟังก์ชันวัตถุประสงค์ _0 จะไม่ใช่ศูนย์
อย่างไรก็ตาม ถ้า _0 = 0 แสดงว่าเงื่อนไขของ Kuhn-Tucker ไม่ใช่วิธีแก้ไขปัญหาที่อยู่ระหว่างการพิจารณา แต่
โครงสร้างของชุดข้อจำกัด ณ จุด x และทฤษฎีบทไม่มีความเกี่ยวข้องโดยตรงกับผลประโยชน์
งานปัจจุบันของเราในการเพิ่มฟังก์ชัน f( ) เนื่องจากการไล่ระดับสีของฟังก์ชัน f( ) จะหายไปเอง จาก
เงื่อนไขของคุห์น-ทัคเกอร์
ดังนั้นจึงเป็นสิ่งสำคัญที่จะต้องระบุลักษณะเงื่อนไขที่รับประกันว่า _0 > 0
เงื่อนไขดังกล่าวเรียกว่าเงื่อนไขความสม่ำเสมอ
ในกรณีที่ปัญหาที่พิจารณานูนออกมา เงื่อนไขประการหนึ่งของความสม่ำเสมอก็คือ
เงื่อนไขที่เรียกว่าสเลเตอร์มีรูปแบบ:
ในกรณีที่ฟังก์ชันวัตถุประสงค์และข้อจำกัดของปัญหาสามารถหาความแตกต่างได้ วิธีที่ง่ายที่สุด
เงื่อนไขความสม่ำเสมอถูกกำหนดขึ้นในแง่ของการไล่ระดับสีของฟังก์ชันจำกัดและมีรูปแบบดังนี้
การไล่ระดับสี ข้อ จำกัด ที่ใช้งานอยู่ที่จุด?x มีความเป็นอิสระเชิงเส้น (ในบรรดาข้อจำกัดที่พิจารณาได้แก่
ควรรวมข้อจำกัดเกี่ยวกับการไม่ปฏิเสธด้วย)
ให้เราแสดงด้วย A ซึ่งเป็นชุดของดัชนีของข้อจำกัดที่ทำงานอยู่ที่จุดที่เหมาะสมที่สุด?x
(รวมถึงดัชนีของข้อจำกัดทั้งหมดในรูปแบบความเท่าเทียมกัน) เช่น
กจ(?x) = 0, เจ 2 ก.
แล้วถ้าข้อจำกัดเกรเดียนต์เป็นเวกเตอร์
มีความเป็นอิสระเชิงเส้นตรง2 จากนั้น _0 > 0 เงื่อนไขนี้เรียกว่าเงื่อนไขความสม่ำเสมอของ Kuhn-Tucker
โปรดทราบว่าหาก _0 > 0 ดังนั้นโดยไม่สูญเสียลักษณะทั่วไป เราสามารถถือว่า _0 = 1 ซึ่งปกติแล้วจะเสร็จสิ้น
ทฤษฎีบทที่สอดคล้องกันเรียกว่าทฤษฎีบท (โดยตรง) คุห์น-ทัคเกอร์ ทฤษฎีบท 198 (ทฤษฎีบทโดยตรงของคุห์น-ทัคเกอร์ สภาพที่จำเป็นการเพิ่มประสิทธิภาพ):
ให้ฟังก์ชัน f( ), g1( ), . - - , gn( ) สามารถหาอนุพันธ์ได้ และ?x เป็นวิธีการแก้ปัญหา (?) เช่นนั้น
X 2 intX และเงื่อนไขความสม่ำเสมอของ Kuhn-Tucker เป็นที่พอใจ
จากนั้นจะมีตัวคูณลากรองจ์ _j > 0, j = 1, - - ,m โดยที่เมื่อ _0 = 1 เป็นที่พอใจ
อัตราส่วนต่อไปนี้:
0, ผม = 1, . - - , n
มันง่ายที่จะจัดรูปแบบทฤษฎีบทนี้ใหม่สำหรับปัญหา (??) และ (???) จำเป็นต้องมีความสามารถเดียวกันที่นี่
การปรับเปลี่ยนเงื่อนไขของคุห์น-ทัคเกอร์ ดังเช่นในทฤษฎีบทของจอห์น
0, ผม = 1, . - - , n
สามารถเขียนใหม่เป็น:
ความสัมพันธ์นี้แสดงให้เห็นว่าที่จุดที่เหมาะสมที่สุด เกรเดียนต์ของฟังก์ชันวัตถุประสงค์นั้นเป็นองค์ประกอบเชิงเส้นตรง
การรวมกันของแอนติเกรดของข้อจำกัด และค่าสัมประสิทธิ์ทั้งหมดนี้ การรวมกันเชิงเส้นไม่เป็นลบ
มีค่า. ข้าว. รูปที่ 17.1 แสดงคุณสมบัตินี้ โดยสัญชาตญาณ แนวคิดเบื้องหลังทรัพย์สินนี้ก็คือ
ถ้าสัมประสิทธิ์ใดๆ ของผลรวมเชิงเส้นเป็นลบ ก็จะเป็นไปได้
เพิ่มมูลค่าของฟังก์ชันวัตถุประสงค์โดยการเคลื่อนที่ไปตามข้อจำกัดนี้ ทฤษฎีบทคูห์น-ทัคเกอร์เวอร์ชันผกผันฉบับหนึ่งระบุว่า เมื่อฟังก์ชันมีความเว้า
f( ), (gk( )) ปฏิบัติตามเงื่อนไขเหล่านี้ในวิธีแก้ปัญหาที่ยอมรับได้x (นั่นคือ จุดที่เป็นไปตามข้อจำกัด
ค่า) สำหรับตัวคูณลากรองจ์บางตัวที่ตรงตามข้อกำหนดของทฤษฎีบทโดยตรง
รับรองว่า?x คือคำตอบของปัญหา
ทฤษฎีบท 199 (ทฤษฎีบทผกผันคุห์น-ทัคเกอร์ /เงื่อนไขที่เพียงพอสำหรับการปรับให้เหมาะสม/):
ให้ f( ) เป็นฟังก์ชันเว้าหาอนุพันธ์ได้, g1( ), . - - , gn( ) - หาอนุพันธ์ได้
ฟังก์ชันกึ่งเว้า เซต X นูนออกมา และจุด?x ยอมรับได้ในโจทย์ (?) และ?x 2
ให้ นอกจากนี้ ยังมีตัวคูณลากรองจ์ _j > 0, j = 1, - - ,m เช่นนั้นเมื่อใด
0 = 1 เป็นไปตามความสัมพันธ์ต่อไปนี้:
0, ผม = 1, . - - , n
แล้ว?x คือวิธีแก้ไขปัญหา (?)
ทฤษฎีบทสามารถจัดรูปแบบใหม่ได้อย่างชัดเจนสำหรับปัญหา (??) และ (???) เพื่อภารกิจ(???)
ข้อ จำกัด ในรูปแบบของความเท่าเทียมกันสามารถเป็นเส้นตรงได้เท่านั้น (นี่เป็นเพราะความจริงที่ว่าข้อ จำกัด ในรูปแบบ
ความเท่าเทียมกัน gj(x) = 0 ควรแสดงโดยใช้ข้อจำกัดสองประการในรูปแบบของอสมการ gj(x) > 0
และ?gj(x) > 0 ซึ่งแต่ละค่าได้รับจากฟังก์ชันเสมือนเว้า สิ่งนี้สามารถเกิดขึ้นได้ก็ต่อเมื่อ
ข้อจำกัดเป็นแบบเชิงเส้น)
ในอีกเวอร์ชันหนึ่งของเงื่อนไขการปรับให้เหมาะสมที่สุดที่เพียงพอ สมมติฐานที่ว่าเป้าหมายมีความเว้า
ฟังก์ชันจะถูกแทนที่ด้วยสมมติฐานของความเว้าเสมือนด้วยการบวกเงื่อนไข rf(?x) 6= 0